Problems with occlusion mapping
The main problem of occlusion mapping are light points in shadow regions (see figure 1). These light points occur when not all of the geometry is represented in the occlusion map. This can occur in a couple of situations:
- not enough occlusion photons are shot
- some (small) primitives in the model are not hit by any occlusion rays
The first situation is obvious. Imagine an exagerated example in which we have a model with 1000 triangles, while the occlusion map only contains 100 occluders. This means that 900 triangles will never be intersected for shadows.
The second situation occurs when the directions from which occlusion rays are shot are chosen in a unfortunate way, thereby missing some triangles. From the last blog post, we could see that shooting occlusion rays to the visible parts of the scene certainly helped, however it could not resolve the problem completely.
Therefore I suggested to create volumetric occluders inside the model. While small triangles in the model can be missed, it is less likely that large occluders inside the model are missed. In the following section I will discuss how the volumetric occluders can be created.
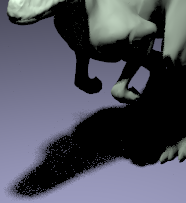 |
| Figure 1: Light points in the shadow region. |
Creating volumetric occluders
I got the idea of using volumetric occluder from the paper "Accelerating Shadow Rays Using Volumetric Occluders and Modified kd-Tree Traversal" (2009) by Peter Djeu, Sean Keely, and Warren Hunt.
They created a kd-tree over a watertight and manifold model. They use a modified version of the surface area heuristic which favors empty leaf nodes in the kd-tree. When the kd-tree is finished, the leaf nodes are marked to be either:
- opaque: it is inside the model
- boundary: it contains geometry of the model
- clear: the node is located outside the model
Labeling boundary nodes is straightforward. We only need to check whether the node contains geometry. If it contains geometry, it is a boundary node.
Labelling a leaf node as clear or opaque is done by casting a ray in a random direction from anywhere within the leaf node. They made the observation that when a ray originates from inside the model, it always has to intersect the model. Furtermore, the normal should be in the same direction as the direction of the ray (their dot product should always be positive).
If the ray misses the geometry of the model or hits a front-facing primitive of the model, we know it is located outside the model and the leaf node is marked as clear. If the ray hits a back-facing primitive of the model, we know it has to be located inside the model and the leaf node is marked opaque.
The labelling process is illustrated in the figure 2. The ellips represents some geometry bounded by a rectanglular gray box. The black lines represent kd splitting planes. The node labelled 1, will be marked as an opaque node since the ray (black arrow) hits the geometry from the back side. Node 2 will be marked as clear, since it intersects the geometry from the front side. Node 3 will also be labelled as clear, since it misses all the geometry (which would be impossible if the ray was shot from inside the model).
 |
| Figure 2: The marking process of the nodes. Node 1 is opaque since it hits the back of the geometry. Node 2 is clear since it hits the geometry from up front. Node 3 is clear since it does not intersect any geometry. |
However, I chose to construct an octree over the model instead of a kd-tree. This makes it alot easier to extract the volumetric occluders. With kd-trees we first need to determine which planes bound a leaf node and construct the volumetric occluder from the intersections of the bounding planes. With an octree we can just use the subdivisions of the bounding box.
The pseudocode for the construction is given below.
vector<BBox> occluders;Mesh model;
vector<BBox> recursiveBuild(primitivesInBoundingBox, boundingBox, depth) {
// Divide the bounding box in 8 sub boxes.
vector<BBox> subBoxes = subdivide(boundingbox);
vector<Primitive> primsInSubBox[8];
// Place the primitives in the correct sub box
for(int i=0;i<subBoxes.size(); ++i)
for(primitive in primitivesInBoundingBox
if (primitive.WorldBound().overlaps(subBoxes[i])
primsInSubBox[i].push_back(primitive);
// Label the empty nodes as opaque or clear
for(int i=0;i<subBoxes.size(); ++i)
if (primsInSubBox[i].size() == 0) {
Point origin = subBoxes[i].center;
Vector direction = generateRandomDirection();
Ray ray(center,direction);
Intersection isect;
if (model->Intersect(ray,&isect)
if (direction.dot(isect.normal) > 0) {
occluders.push_back(subBoxes[i]);
break;
}
}
// Apply recursion
if (depth > 0)
for(int i=0;i<subBoxes.size();++i)
if (primsInSubBox[i].size() > 0)
recursiveBuild(primsInSubBox[i],subBox[i],depth-1);
}
This algorithm is shown in progress for different depth levels in the figure below:
 |
| Figure 3: Octree subdivision |
Results
The figures below show the algorithm implemented in PBRT for the killeroo and bunny scene and different maximum recursion depths:
Killeroo-scene
 |
| Figure 4: Occluder creation with maximum recursion depth 4 |
 |
| Figure 5: Occluder creation with maximum recursion depth 5 |
 |
| Figure 6: Occluder creation with maximum recursion depth 6 |
 |
| Figure 7: Occluder creation with maximum recursion depth 7 |
 |
| Figure 8: Occluder creation with maximum recursion depth 8 |
Bunny scene
 |
| Figure 9: Occluder creation with maximum recursion depth 3 |
 |
| Figure 10: Occluder creation with maximum recursion depth 4 |
 |
| Figure 11: Occluder creation with maximum recursion depth 5 |
 |
| Figure 12: Occluder creation with maximum recursion depth 6 |
Conclusion
The algorithm is implemented, however, it only works correctly for the killeroo scene at the moment. This is the only scene in which the model is stored as one complete mesh (e.g. the teapot is a combination of a lot of seperate shapes) that is watertight and manifold. The bunny is partially correct, however, there are some errors in the occluders (I'm not sure why yet).
The number of occluders can become large at higher recursion depths. However, it could be possible to combine multiple occluders to one larger occluder. This would decrease storage requirements by a large amount and increase performance.
The next step is combining the occluders with the occlusion mapping technique. When this is done and gives good results, probabilistic visibility will be added to make clever occluder selections.
Misschien is het geen slecht idee een soort polygon reduction techniek te gebruiken om je volumetric occluders te creëren.
ReplyDeleteBijvoorbeeld: http://dev.gameres.com/program/visual/3d/PolygonReduction.pdf
Ik weet niet hoe de rekencomplexiteit vergelijkt met je octree subdivision-algoritme, maar ik vermoed dat je met polygon reduction behoorlijk aggresief te werk kan gaan. Dit kan in veel gevallen een mesh geven met vrij weinig polygonen die toch vrij goed aansluit aan het origineel. Dit zou ook moeten werken met discontinue meshes zoals de theepot.
Trouwens, goed werk!
Björn
Another viable option for volumetric occluders might be using a low-poly version of the original model as one big volumetric occluder, which has a lot less complexity than the original model.
ReplyDeleteSuch a low poly version could be found by using a polygon reduction algorithm, i.e:
http://dev.gameres.com/Program/Visual/3D/PolygonReduction.pdf
An aggressive implementation of such an algorithm can produce a very low poly representation of the mesh which resembles the original shape. This would also work with discontinuous meshes.
I'm not sure how the runtime/memory requirements would compare with octree subdivision, however.
btw: great work!
Thanks you very much and sorry for the late reaction.
DeleteI hadn't thought of this as a possible solution, I will certainly give it a try in the next semester.
It looks very promising, since it would reduce the number of occluders in the photons by a large amount while the occluders are probably larger and better.